MOSAIC Battery Simulator
For simulation of electric vehicles, the Battery Simulator handles the actual processes of
- Discharging
- Charging (in connection with a charging station)
- Recuperation
Installation
The Charging Station and Battery Simulators are part of
MOSAIC Extended.
For further information on licenses, feel free to contact us via
mosaic@fokus.fraunhofer.de.
Overview
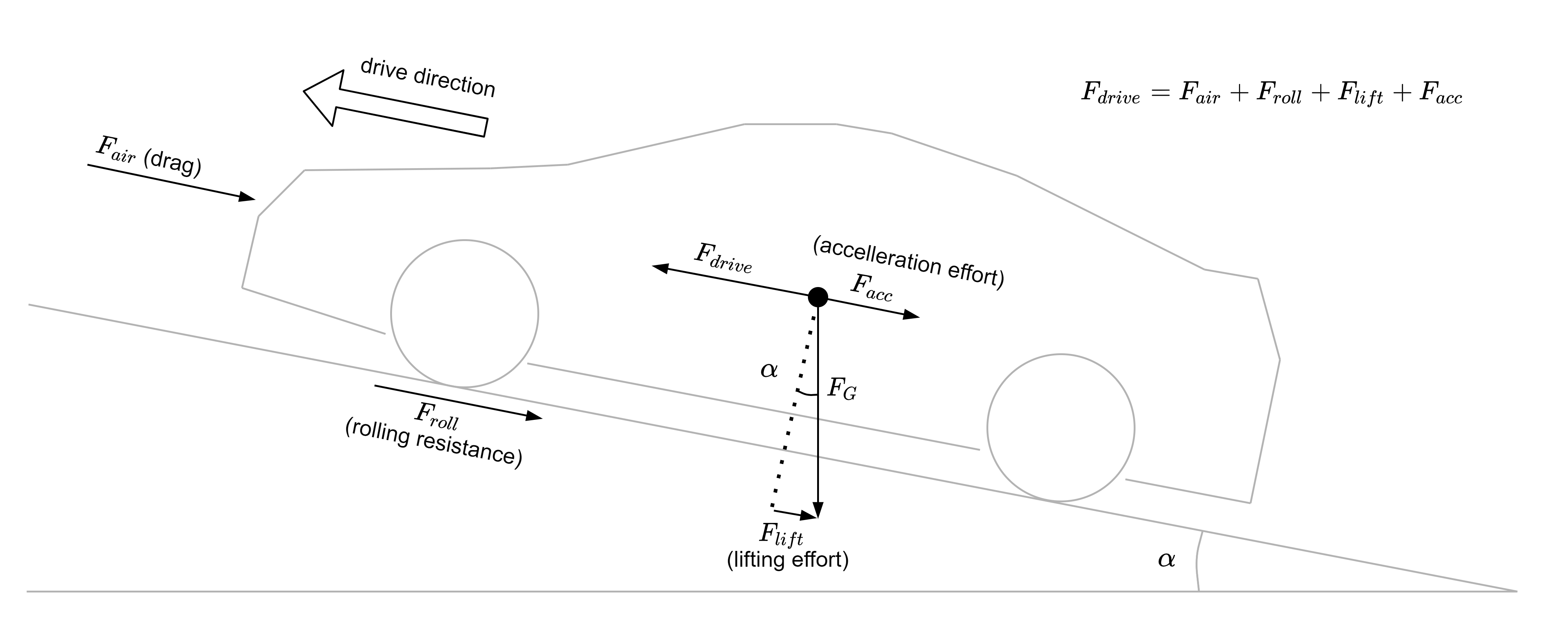
In order for a vehicle to move the drive train has to overcome the forces of resistance on the vehicle. Additionally, the energy of consumers that run of the electric motor has to be generated. These forces plus the consumed energy minus the recuperation energy build a balance that will be calculated by the battery simulator. Below is an illustration of all the forces at hand.
To provide for different electric vehicle types the Battery Simulator takes environment, vehicle characteristics and battery attributes into account. One of the main features of the battery ambassador is that it can utilize dynamic class loading to use custom models, tailored to the user’s needs. The Battery Simulator comes bundled with some basic but powerful models for vehicles, environment and the battery. These will be explained in the following paragraphs.

Configuration
└─ <scenario_name>
└─ battery
└─ battery_config.json ................. Battery ambassador configuration file
The prior discussed configuration for different models for vehicles, batteries and the environment happens in the battery_config.json. For
the vehicle and battery model it is possible to define separate models per vehicle prototype and default models. Whenever an electric
vehicle is added and no models for the prototype were defined the Battery Simulator defaults to those default models. Currently, the
environment model is statically defined for all vehicles and the entire scenario.
Vehicle model
The vehicle model holds the general properties of a vehicle influencing the battery consumption. Examples would be the weight of the vehicle, and the voltage at which the electric engine operates. As with the other models, the provided class for the vehicle model directly affects what can be configured here. If other properties are needed for the vehicle, this is the right place to put them. It is possible to define separate consumers like the AC or radio, which will also have an effect on the discharging of the battery. Additionally, the recuperation support of a vehicle could be configured.
To implement an own vehicle, the class AbstractVehicleModel has to be extended.
Bundled Model
The bundled vehicle model just allows to statically set all parameters necessary for the calculation of employed forces. It comes pre-configured with attributes oriented on an Electric Smart. In a real-world scenario however many of these attributes are dynamic, the weight for example changes with the amount of passengers and carried cargo.
Battery model
The battery model defines the battery used by the vehicle and especially handles (dis)charging characteristics. Important properties would be the number of cells and their capacity.
To implement an own battery model, the class AbstractBatteryModel
needs to be extended.
Bundled Models
The Battery Simulator comes bundled with two battery models, namely the SimpleBatteryModel and the LithiumIonBatteryModel. While the
simple model just linearly charges, discharges and recuperates energy, the lithium battery model employs a more sophisticated emulation of
the behaviors observed in real-world lithium-ion batteries. This for example includes reduced charging speeds at higher battery capacities.
Environment model
Environmental factors like rolling resistance of the given underground or air drag go into this section. At the current state, a basic environment model is bundled with the Battery Simulator. To implement a custom environment
model, AbstractEnvironmentModel has to be extended.
Bundled Model
The bundled model includes basic environmental constants, which can deviate slightly with different altitudes, weather conditions and the likes. However, for most applications static definitions should be sufficient.
Example configuration
{
"defaultVehicleModel": {
"type": "SimpleVehicleModel",
"vehicleMass": "1060 kg",
"referenceArea": 1.95,
"dragCoefficient": 0.375,
"tankToWheelEfficiency": 0.7,
"electricMotorOperatingVoltage": "350 V",
"consumerOperatingVoltage": "12 V",
"recuperationEfficiency": 1.0,
"maxRecuperationPower": 60e3,
"electricConsumers": [
{ "Radio": 10 },
{ "HeadLight": 100 }
]
},
"defaultBatteryModel": {
"type": "SimpleBatteryModel",
"cells": 100,
"cellVoltage": "5 V",
"cellCapacity": "100 Ah",
"chargingEfficiency": 0.8,
"minStateOfCharge": 1,
"maxStateOfCharge": 1
},
"vehicleModelMap": {
"prototype_1": {
"type": "SimpleVehicleModel",
"vehicleMass": "1060 kg",
"referenceArea": 1.95,
"dragCoefficient": 0.375,
"tankToWheelEfficiency": 0.7,
"electricMotorOperatingVoltage": "350 V",
"consumerOperatingVoltage": "12 V",
"recuperationEfficiency": 1.0,
"maxRecuperationPower": 60e3,
"electricConsumers": [
{ "Radio": 10 },
{ "HeadLight": 100 }
]
}
},
"batteryModelMap": {
"prototype_1": {
"type": "SimpleBatteryModel",
"cells": 100,
"cellVoltage": "5 V",
"cellCapacity": "100 Ah",
"chargingEfficiency": 0.8,
"minStateOfCharge": 1,
"maxStateOfCharge": 1
}
},
"environmentModel": {
"type": "DefaultEnvironmentModel",
"fluidDensity": 1.293,
"rollingResistanceCoefficient": 0.01,
"gravitationalAcceleration": 9.81
}
}
This listing shows how the vehicle, environment and battery model classes for the bundled models are configured.