Thanks for your response, Jakob.
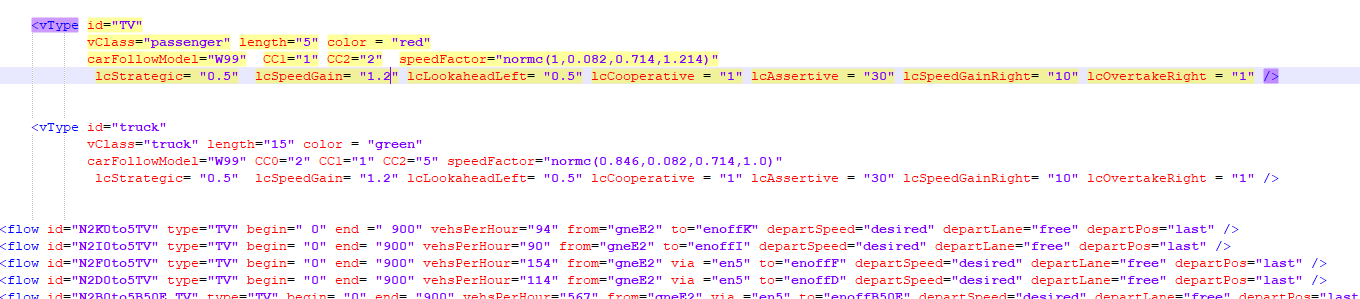
The problem with reducing lcAssertive to smaller values as it seems to me is that in some cases merging vehicles coming from on-ramps won't find a long enough gap to merge before the end of the acceleration lane, and this creates a repetitive stopping and bottleneck instances downstream of merging segments. I noticed that even if I set high values for lcStrategic this problem keeps happening. I thought this is probably linked to the min gap parameters, but I'm using the default tau(which I believe is low enough) and here are my parameters for the car following and lane changing models. Do you see any other sources of trouble?
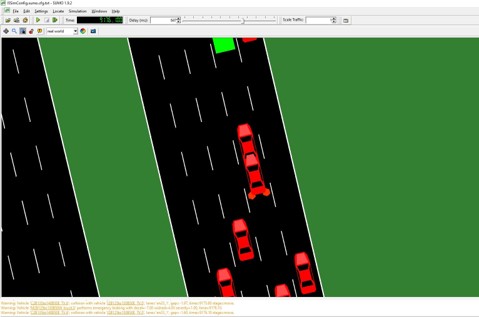
One other problem that I'm facing is lateral instability. I am not sure if this is the correct term, but basically in some occasions vehicles tend to perform a series of lane changes within a few seconds time frame, especially upstream of the location of the major bottleneck location (interchange) in the freeway I'm simulating . It looks as if these vehicles(drivers) are hesitant and cannot decide which lane to drive in. I think in most cases the cause of those abrupt lane changes is the LcSpeedGain parameter. However, this parameter has proved vital in getting vehicles to shift to lanes with less traffic density when being in a more congested lane. I'm attaching a short recording which displays this problem. Any thoughts?
Best regards,
Ahmad Abdallah.