Thanks for your reply!
Kind regards,
Jan
Von: openpass-wg-bounces@xxxxxxxxxxx [mailto:openpass-wg-bounces@xxxxxxxxxxx]
Im Auftrag von Biegel, Reinhard
Gesendet: Freitag, 13. Juli 2018 06:59
An: Openpass Working Group <openpass-wg@xxxxxxxxxxx>
Betreff: Re: [openpass-wg] next OSI Commit / load OpenDrive scenario
Hello Jan,
Thanks for your feedback!
My apologies for being behind the schedule regarding the OSI commit. We intend to publish it until mid of next week.
Best regards,
Reinhard
Hi Reinhard,
thanks for taking care of this question! This is a great example how this community should handle such requests.
We discussed this planned commit with you and BMW during the last openPASS meetings, see here:
https://wiki.eclipse.org/File:Att3_openPASS_AC_180328_Timing_OSI_World.pdf
Can you please give an update when the “OSI/OpenDRIVE World implementation” will be released?
Take care,
Jan
Hello,
Sceneries without intersections can be imported with the upcoming OSI commit, but not all elements will be instantiated in the OSI world. For intersections I’m not aware of any schedule, but I will talk about that topic
in an upcoming meeting with BMW. Stay tuned for updates
😉
Regards,
Reinhard Biegel
Reinhard Biegel,
Thank you very much for this information. Do you have an idea when it would be possible to use OpenDrive XML’s (especially intersections) to create the scenery?
kind regards
Christian Siebke
--------------------------------------------------------------------------------------
Dipl.-Ing.
Christian Siebke
wissenschaftlicher Mitarbeiter
Forschungsbereich
Verhaltensmodellierung von Verkehrsteilnehmern
Technische Universität Dresden
Institut für Automobiltechnik Dresden - IAD
Lehrstuhl Kraftfahrzeugtechnik
George-Baehr-Straße 1c
01062 Dresden
Tel.: +49 (0) 351 463 40751
Fax: +49 (0) 351 463 37066
Email:christian.siebke@xxxxxxxxxxxxx

-----------------------------------------------------------------------------------------
Hello Mr. Siebke,
I’m currently working on openPASS on behalf of BMW and will provide the next OSI commit. It will feature a limited scenery of a short track with curvature, as well as a very simple driver model only. I’m currently not
aware of other people digging into this topic.
In the next OSI commit it will not be possible to load intersections. A roadmap containing this feature is not created yet.
Regarding your other questions:
Yes, an agent has access to its laneID. It can also access the current position in the world (in x-y- and s-t-coordinates). But it will not have access to a trajectory, as the driver model determines the trajectory “on
the fly”. As far as I can say, you would have to extrapolate the trajectories from observed data.
I’m pretty new to the openPASS community, so if anyone doesn’t agree with my statements or can provide additional information I’d appreciate that
😊
Best Regards,
Reinhard Biegel
in-tech engineering GmbH • Zieglergasse
3/2 • A-1070 Wien
Reinhard Biegel
Software Engineer
reinhard.biegel@xxxxxxxxxxx
Tel.: +43 (0)1 - 34 34 257 - 515
Mobil: +43 (0)676 - 780 35 11
www.in-tech.com
IN2 in-tech engineering GmbH, Sitz der Gesellschaft: Wien
Geschäftsführer: Christian Wagner, Manfred Heidegger
Registergericht: Handelsgericht Wien, FN 43 4858y
Dear openpass members,
I am a scientific assistant at the Technical University of Dresden. Recently I started working with the openpass framework. My focus is the development of driver behavior models for urban scenarios (junctions).
My question relates to the next OSI commit. Will it be possible to load OpenDrive XML files like intersections? Will it also be possible for the agent to access his laneID and trajectory (X-Y coordinates) to which he
is connected?
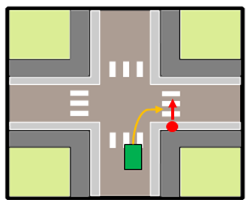
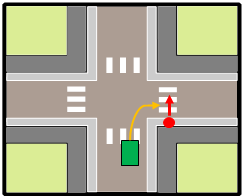
Example:
-
Agent turning right on junction
-
Pedestrian will cross the road
I need the trajectory of both Agents to calculate their intersection point.
With kind regards
Christian Siebke
--------------------------------------------------------------------------------------
Dipl.-Ing. Christian Siebke
wissenschaftlicher Mitarbeiter
Forschungsbereich
Verhaltensmodellierung von Verkehrsteilnehmern
Technische Universität Dresden
Institut für Automobiltechnik Dresden - IAD
Lehrstuhl Kraftfahrzeugtechnik
George-Baehr-Straße 1c
01062 Dresden
Tel.: +49 (0) 351 463 40751
Fax: +49 (0) 351 463 37066
Email:christian.siebke@xxxxxxxxxxxxx

-----------------------------------------------------------------------------------------
|
If you are not the addressee, please inform us immediately that you have received this e-mail by mistake, and delete it.
We thank you for your support.
|