[
Date Prev][
Date Next][
Thread Prev][
Thread Next][
Date Index][
Thread Index]
[
List Home]
|
Re: [volttron-dev] [EXTERNAL] Re: Custom Controller Agent Causes Modbus Read Error
|
| Joe
What you wrote below should be working. It has been a while since I last debugged this type of stuff but it looks good to me. Most modbus devices like only one IP address + TCP port to act as the primary (master) and they break when you have two primaries. This was my first guess.
Is it possible to do a packet capture (e.g. Wireshark) to see the transactions on the wire?
I cc-d Craig on here.
Thanks
Bora On Feb 23, 2024, at 8:56 AM, Thompson, Joe <jthompson@xxxxxxxx> wrote:
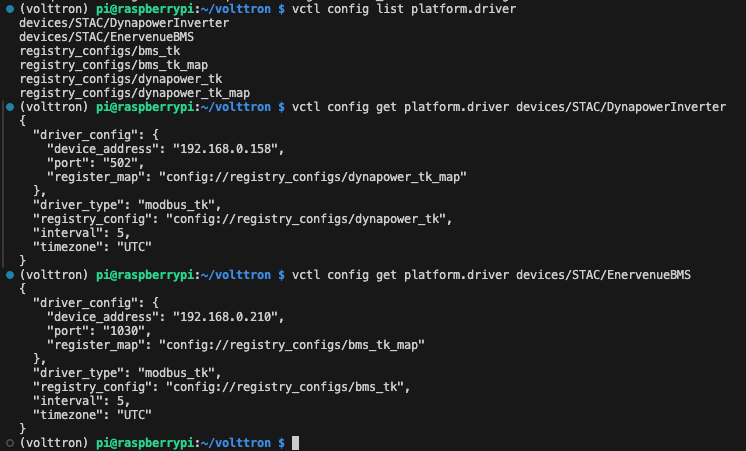
Hey Andrew, See the attached agent.txt (changed from “agent.py” for emailing). Specifically, the “_handle_publish” and “write_to_device” methods. Note, I have changed things up slightly after Dave’s reply. Now, I am subscribed to the “devices/STAC/DynapowerInverter” message, which takes longer to come through than "devices/STAC/EnervenueBMS" messages. Which I think is helping.. In short, I am now receiving the “devices/STAC/DynapowerInverter” data as the input to my “_handle_publish” callback. Then I use this to read the the points that I need from "devices/STAC/EnervenueBMS" # read current SoC from battery system current_soc = self.vip.rpc.call( 'platform.driver', 'get_point', path=self.bms_write_device, point_name='EnerStation SOC' ).get(timeout=1) Then I send my command to “devices/STAC/DynapowerInverter” using the actuator (after scheduling time for control of the device): result = self.vip.rpc.call( 'platform.actuator', 'set_multiple_points', self.core.identity,topic_values).get( timeout=1) -- Joe How is your control agent interacting with those devices? — Andrew Rodgers Co-Founder ACE IoT Solutions https: //aceiotsolutions. com [aceiotsolutions. com] On February 23, 2024 at 11: 42 AM EST volttron-dev@ eclipse. org wrote: Hi Bora, Thanks for How is your control agent interacting with those devices? On February 23, 2024 at 11:42 AM EST volttron-dev@xxxxxxxxxxx wrote: Hi Bora, Thanks for the response. Unfortunately, I do not really follow your point or know what I should do with this information. I have these 2 devices configured under the platform.driver like this:
|
Is this what you mean by “multiplex the controls through the platform driver”? Your modbus devices do not support multiple modbus primaries. You need to multiplex the controls through the platform driver. There is no reason to have two modbus primaries On Thu, Feb 22, 2024, 12: 25 PM Thompson, Joe via volttron-dev <volttron-dev@ eclipse. org> Your modbus devices do not support multiple modbus primaries. You need to multiplex the controls through the platform driver. There is no reason to have two modbus primaries Hello Volttron Team, Background: I am using Volttron 8.1.3 on a Raspberry Pi to coordinate the operation / testing of 2 devices over Modbus: - An energy storage system with a BMS that Volttron’s platform.driver communicates with over modbus
- An inverter that also communicates with Volttron’s platform.driver via modbus
Using the Listener Agent I can see that the platform.driver is reading all of my modbus points perfectly every 5 seconds (see the attached volttron_Without_Controller.log). I have a simple custom agent, enervenue_ctrlagent (see the “agent.txt” file, changed from “agent.py [agent.py]” for attaching), that is subscribed to the "devices/STAC/EnervenueBMS" topic and runs a simple read from the battery, decide what to do, and write to the inverter loop every 5 seconds when new "devices/STAC/EnervenueBMS" data comes in. The writing is just to a single “Output Power Command” register on the inverter. The Problem: When enervenue_ctrlagent is installed and started, modbus reads of the inverter begin to fail. The controller’s attempts to write power setpoints are successful, but I start to receive this modbus_tk error (see the attached volttron_With_Controller.log): Error! Filename not specified. Expected Behavior: I was expecting that my controller agent should be able to run in tandem with the platform agent with no conflicts between reading and writing, but something funny is happening that I don’t understand. Any and all help is greatly appreciated! Joe Thompson Engineer / Scientist Electric Power Research Institute Energy Storage and Distributed Generation (912) 663-3407 *** This email message is for the sole use of the intended recipient(s) and may contain information that is confidential, privileged or exempt from disclosure under applicable law. Unless otherwise expressed in this message by the sender or except as may be allowed by separate written agreement between EPRI and recipient or recipient’s employer, any review, use, distribution or disclosure by others of this message is prohibited and this message is not intended to be an electronic signature, instrument or anything that may form a legally binding agreement with EPRI. If you are not the intended recipient, please contact the sender by reply email and permanently delete all copies of this message. Please be advised that the message and its contents may be disclosed, accessed and reviewed by the sender's email system administrator and/or provider. ***
|
"""
Agent documentation goes here.
"""
__docformat__ = 'reStructuredText'
import logging
import sys
from volttron.platform.agent import utils
from volttron.platform.vip.agent import Agent, Core, RPC
from volttron.platform.agent.utils import format_timestamp, get_aware_utc_now
import pandas as pd
_log = logging.getLogger(__name__)
utils.setup_logging()
__version__ = "0.1"
def enervenue_ctrl(config_path, **kwargs):
"""
Parses the Agent configuration and returns an instance of
the agent created using that configuration.
:param config_path: Path to a configuration file.
:type config_path: str
:returns: EnervenueCtrl
:rtype: EnervenueCtrl
"""
try:
config = utils.load_config(config_path)
except Exception:
config = {}
if not config:
_log.info("Using Agent defaults for starting configuration.")
setting1 = int(config.get('setting1', 1))
setting2 = config.get('setting2', "some/random/topic")
sched_path = config['control_schedule_path']
return EnervenueCtrl(sched_path, setting1, setting2, **kwargs)
class EnervenueCtrl(Agent):
"""
Document agent constructor here.
"""
def __init__(self, sched_path, setting1=1, setting2="some/random/topic", **kwargs):
super(EnervenueCtrl, self).__init__(**kwargs)
_log.debug("vip_identity: " + self.core.identity)
self.agent_id = "enervenue_sched_cntl" #enervenue_ctrl
self.sched_path = sched_path
self.setting1 = setting1
self.setting2 = setting2
self.bms_write_device = 'STAC/EnervenueBMS'
self.inverter_write_device = 'STAC/DynapowerInverter'
self.inverter_rated_kw = 124.7
# Configure the actual modbus writes and format the write request
self.dynapower_control = {
'Fault Reset': 0, # 0: No Action 1: Reset All Latched Alarms/Faults
'Operation Mode Select': 3, # 1: Idle State 3: Grid-Tied Mode
'Output Power Command': 0, # Percentage of rated power (124.7kW), negative = charge
'PCS Set Operation': 0, # 0: No Action 1: Start PCS Operation 2: Stop PCS Operation
}
self.default_config = {
"control_schedule_path": sched_path,
"setting1": setting1,
"setting2": setting2
}
# Set a default configuration to ensure that self.configure is called immediately to setup
# the agent.
self.vip.config.set_default("config", self.default_config)
# Hook self.configure up to changes to the configuration file "config".
self.vip.config.subscribe(self.configure, actions=["NEW", "UPDATE"], pattern="config")
def configure(self, config_name, action, contents):
"""
Called after the Agent has connected to the message bus. If a configuration exists at startup
this will be called before onstart.
Is called every time the configuration in the store changes.
"""
config = self.default_config.copy()
config.update(contents)
_log.debug("Configuring Agent")
try:
sched_path = config["control_schedule_path"]
setting1 = int(config["setting1"])
setting2 = str(config["setting2"])
except ValueError as e:
_log.error("ERROR PROCESSING CONFIGURATION: {}".format(e))
return
self.setting1 = setting1
self.setting2 = setting2
self.sched_path = sched_path
self.system_topic = "devices/STAC/DynapowerInverter"
self.sched = pd.read_excel(self.sched_path)
self.sched_step_ind = 0
self.parse_control_step()
self.timed_step_end_utc = None if pd.isna(self.duration) else pd.Timestamp.utcnow() + pd.Timedelta(seconds=self.duration)
self._create_subscriptions(self.system_topic)
# self._create_subscriptions(self.setting2)
### SUBSCRIBE TO BESS AND INVERTER POINTS. GO THROUGH CONTROL LOOP AT EACH READ
def _create_subscriptions(self, topic):
"""
Unsubscribe from all pub/sub topics and create a subscription to a topic in the configuration which triggers
the _handle_publish callback
"""
self.vip.pubsub.unsubscribe("pubsub", None, None)
# subscribe to all read data from the BMS
self.vip.pubsub.subscribe(peer='pubsub',
prefix=topic,
callback=self._handle_publish)
def parse_control_step(self):
# get details for the current control step
self.ctrl_step = self.sched.loc[self.sched_step_ind]
self.step_name = self.ctrl_step['Step']
self.target_soc = self.ctrl_step['Target SoC (%)']
self.power_cmd = self.ctrl_step['Power (kW)\n+ = discharge']
self.duration = self.ctrl_step['Duration (s)']
self.action = 'discharge' if self.power_cmd > 0 else 'charge' if self.power_cmd < 0 else 'idle'
def _handle_publish(self, peer, sender, bus, topic, headers, message):
"""
Callback triggered by the subscription setup using the topic from the agent's config file
For now we can write out all the control logic here
"""
# current_soc = float(message[0]['EnerStation SOC'])
# read current SoC from battery system
current_soc = self.vip.rpc.call(
'platform.driver',
'get_point',
path=self.bms_write_device,
point_name='EnerStation SOC'
).get(timeout=1)
relay_status_topics = [self.bms_write_device + "/" + 'String %d Relay status' % s for s in range(1, 4)]
point_results = self.vip.rpc.call('platform.actuator', 'get_multiple_points', relay_status_topics).get(timeout=1)
connected_strings = sum([point_results[0][s] for s in relay_status_topics])
# adjust the power request given the number of strings online. Right now String 1 is disabled, so only 2 strings are available.
try:
power_command = (self.power_cmd / 2) * connected_strings
except ZeroDivisionError as e:
do_not_proceed = True
_log.info("No Strings are connected. Stopping the inverter.")
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': 0, # Percentage of rated power (124.7kW), negative = charge
'PCS Set Operation': 2, # 0: No Action 1: Start PCS Operation 2: Stop PCS Operation
}
)
# convert power command into percent of rated power
power_command_pct = (power_command / self.inverter_rated_kw) * 100
# if the current step name is not an integer then send an idle command
try:
int(self.ctrl_step.name)
do_not_proceed = False
except ValueError as e:
do_not_proceed = True
_log.info("Schedule was completed. Stopping the inverter.")
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': 0, # Percentage of rated power (124.7kW), negative = charge
'PCS Set Operation': 2, # 0: No Action 1: Start PCS Operation 2: Stop PCS Operation
}
)
# check whether we are in a timed / duration step
if self.timed_step_end_utc is not None: # we are within a timed step
if pd.Timestamp.utcnow() < self.timed_step_end_utc:
# send write command that corresponds to this step
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': power_command_pct, # Percentage of rated power (124.7kW), negative = charge
}
)
# do not proceed with the rest of control logic
# wait for next read from battery
return
else: # enough time has passed move on to the next step
self.timed_step_end_utc = None
self.sched_step_ind += 1
self.parse_control_step()
if pd.isna(self.duration): # then this is a power / SoC command
if (self.action == 'charge') & (current_soc < self.target_soc):
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': -20 #power_command_pct, # Percentage of rated power (124.7kW), negative = charge
}
)
_log.info("Sent charge command of %0.1fkW" % power_command)
elif (self.action == 'discharge') & (current_soc > self.target_soc):
_log.info("Sending discharge command of %0.1fkW" % power_command)
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': power_command_pct, # Percentage of rated power (124.7kW), negative = charge
}
)
else: # move on to the next step and execute that step
self.sched_step_ind += 1
self.parse_control_step()
self.timed_step_end_utc = None if pd.isna(self.duration) else pd.Timestamp.utcnow() + pd.Timedelta(seconds=self.duration)
_log.info("Moving on to next step with power of %0.1fkW" % power_command)
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': power_command_pct, # Percentage of rated power (124.7kW), negative = charge
}
)
else: # this must be a duration command
self.timed_step_end_utc = None if pd.isna(self.duration) else pd.Timestamp.utcnow() + pd.Timedelta(seconds=self.duration)
self.write_to_device(
device=self.inverter_write_device,
write_values={
'Output Power Command': power_command_pct, # Percentage of rated power (124.7kW), negative = charge
}
)
def write_to_device(self, device, write_values):
"""
Write some points to a device
"""
# Create a start and end timestep to serve as the times we reserve to communicate with the device
_now = get_aware_utc_now()
str_now = format_timestamp(_now)
_end = _now + pd.Timedelta(seconds=3600)
str_end = format_timestamp(_end)
# Wrap the timestamps and device topic (used by the Actuator to identify the device) into an actuator request
schedule_request = [[device, str_now, str_end]]
# Use a remote procedure call to ask the actuator to schedule us some time on the device
_log.info("schedule_request {}".format(schedule_request))
result = self.vip.rpc.call(
'platform.actuator', 'request_new_schedule', self.core.identity, 'my_test', 'HIGH', schedule_request).get(
timeout=1)
# start by creating our topic_values
topic_values = []
for point, value in write_values.items():
# create a (topic, value) tuple and add it to our topic values
topic_values.append((device + '/' + point, value))
# Now use another RPC call to ask the actuator to set the point during the scheduled time
_log.info("Modbus points to write: {}".format(topic_values))
result = self.vip.rpc.call(
'platform.actuator', 'set_multiple_points', self.core.identity, topic_values).get(
timeout=1)
_log.info("Modbus write response: {}".format(result))
@Core.receiver("onstart")
def onstart(self, sender, **kwargs):
"""
This is method is called once the Agent has successfully connected to the platform.
This is a good place to setup subscriptions if they are not dynamic or
do any other startup activities that require a connection to the message bus.
Called after any configurations methods that are called at startup.
Usually not needed if using the configuration store.
"""
# Example publish to pubsub
# self.vip.pubsub.publish('pubsub', "some/random/topic", message="HI!")
_log.info("Schedule Controller started")
# Example RPC call
# self.vip.rpc.call("some_agent", "some_method", arg1, arg2)
pass
@Core.receiver("onstop")
def onstop(self, sender, **kwargs):
"""
This method is called when the Agent is about to shutdown, but before it disconnects from
the message bus.
"""
self.write_step(power=0)
pass
@RPC.export
def rpc_method(self, arg1, arg2, kwarg1=None, kwarg2=None):
"""
RPC method
May be called from another agent via self.core.rpc.call
"""
return self.setting1 + arg1 - arg2
def main():
"""Main method called to start the agent."""
utils.vip_main(enervenue_ctrl,
version=__version__)
if __name__ == '__main__':
# Entry point for script
try:
sys.exit(main())
except KeyboardInterrupt:
pass