Hello,
I am trying to recreate the same vehicle lane-changing behaviour that SUMO displays when a flow with the following definition:
<flow arrivalLane="current" arrivalPosLat="center" begin="0" departLane="random" departPosLat="center" departSpeed="random" id="f" number="100" route="r0" type="veh" vehsPerHour="10000" />
is allowed to complete their route on a single 1000 m, 3-lane road (edge).
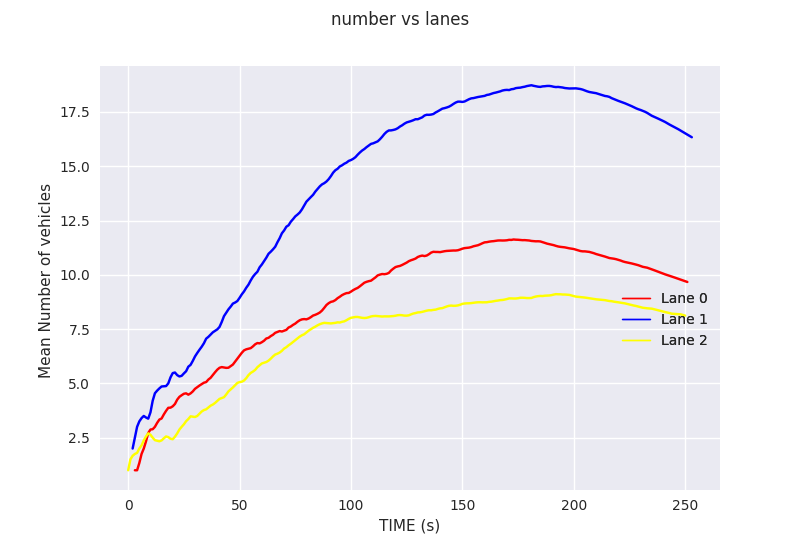
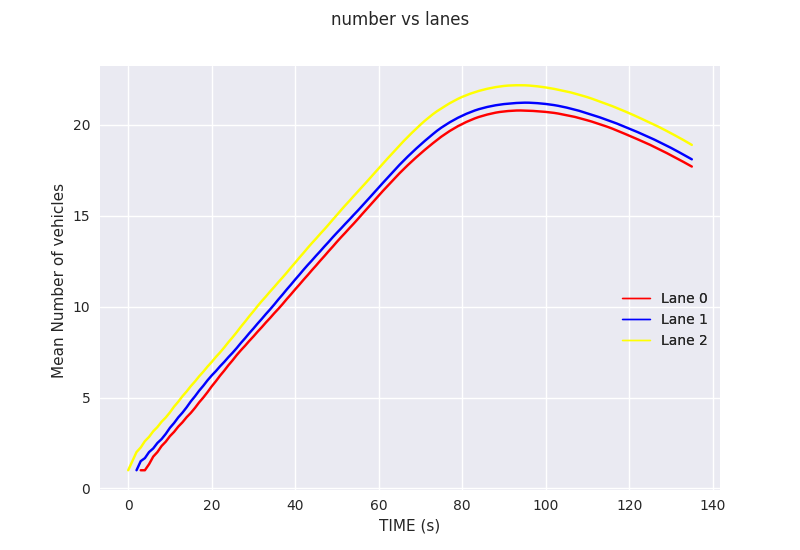
The rolling average of number of vehicles on each lane is almost identical (which is what I would expect) from this simulation:
To recreate the same type of behaviour in my rule-based simulation, I chose left, right or stay with equal probability for each car at every step.
import numpy as np
.
.
.
prob = np.array([1/3, 1/3, 1/3]) # equal probability
action = "" 0, +1], p=prob) # -1 = right, 0 = stay, +1 = left
.
.
traci.vehicle.changeLaneRelative(vehID=veh_id, indexOffset=action, duration=5) # for each vehicle
.
.
.
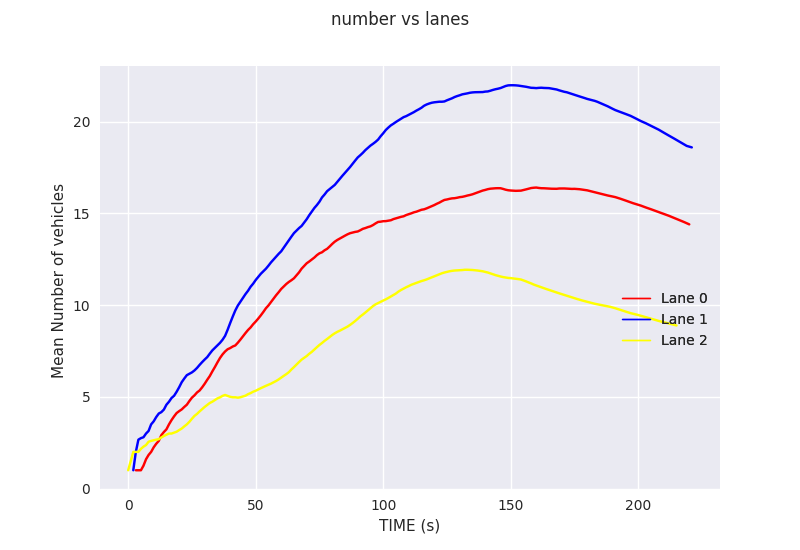
...but the behaviour seems to avoid the last lane (lane 2):
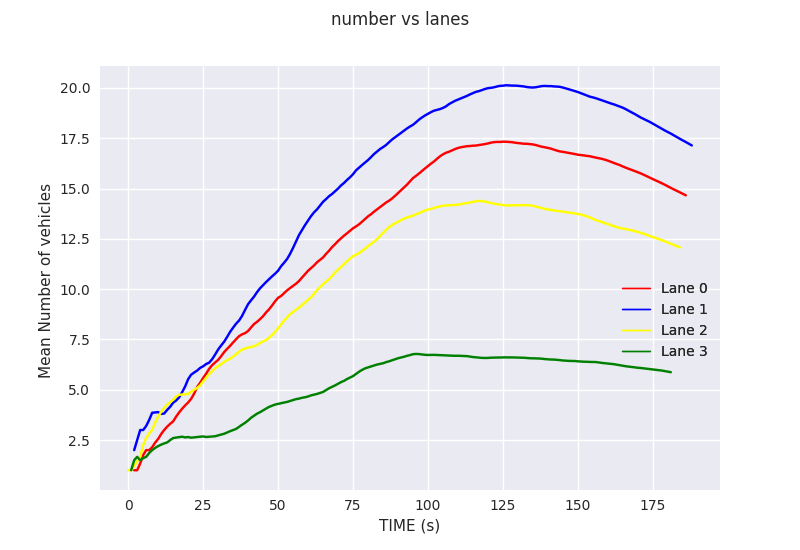
I tried adding one more lane and I observed the same behaviour - the last lane seems to be avoided:
My lane change mode is set to LC_MODE = 1557. Is there any possible reason for this? Maybe some interaction of changeLaneRelative with SUMO that is causing this? Please advise.
Thank you.
Sincerely,
Hriday