Dear Sumo-Users,
I currently try to setup a scenario where a lane is initially closed and later opened for all vehicle classes. I close the
lanes on scenario start with the TraCI command 0xc3 (Change lane State) by setting disallowed vehicles to all vehicle classes, which works fine. Vehicles do not enter the lane anymore but try to change lanes beforehand accordingly.
However, when I open the lanes after a certain amount of time by allowing all vehicles classes, the vehicles do not drive
on the re-opened lanes anymore. Instead, they stick to their previous made choice and still try to change lanes before entering the edge, resulting in traffic jams. Any suggestions? Is this an error?
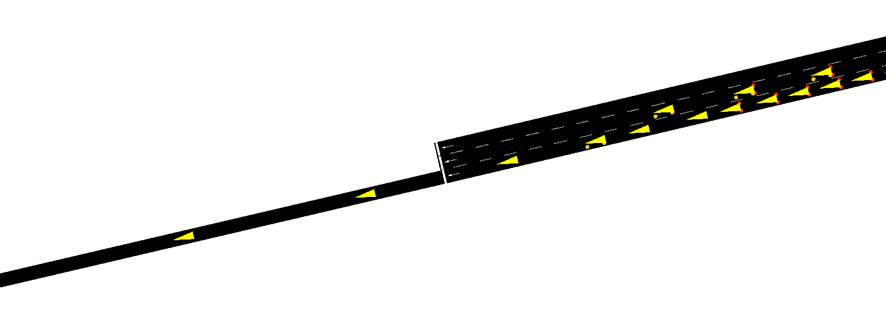
Before opening the lanes:
- Vehicles try to change lanes to the most-left beforehand.
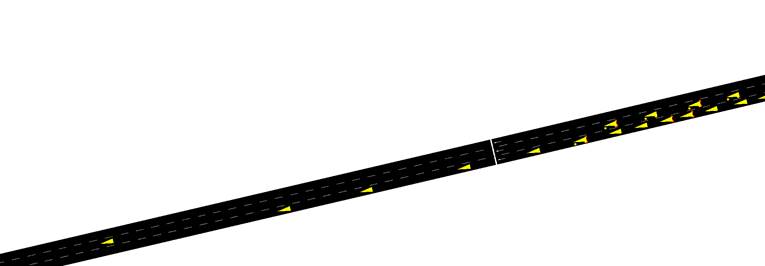
After opening lanes:
- Vehicles still try to change to the left-most lanes before entering the next edge.
- Also, after driving onto the next edge on the left-most lane, they switch lanes to the right again (e.g. vehicles on the
left side of the picture).
Kind regards,
Karl