Hello Daniel&Tom,
Thank you for your meaningful work.
I am encouraged to see that we are trying to clearly define “What we do” and “How we do” regarding SDV. I think this is the fundamental question that we should answer first.
I suggest the big players (ETAS, Microsoft, Caraid etc) lead the community to make a reference architecture first, or a metro map, whatever the format it is, to guide the community. Otherwise people may feel lost.
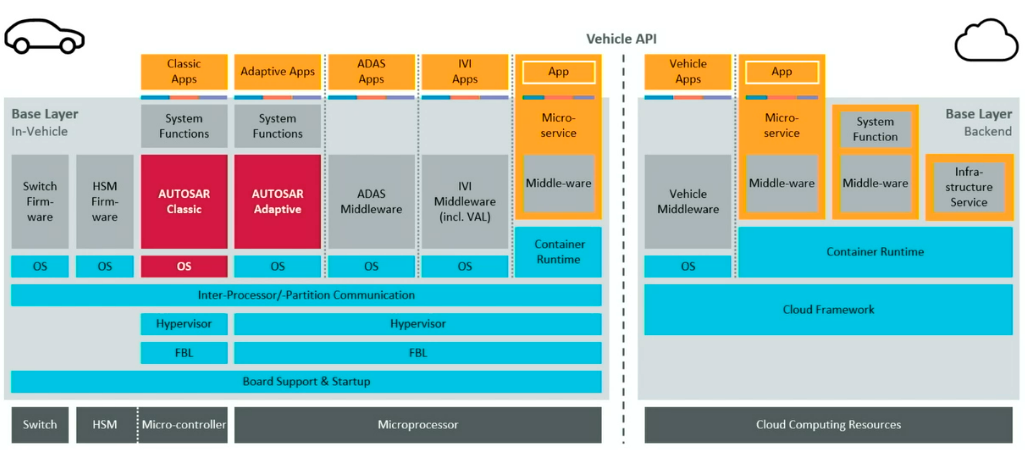
Below is an example I collect from AOC-2022, hope it’s helpful for us.
Source: Vector, Vehicle OS_ Boost or Threat for AUTOSAR, Markus Oertel
Best Regards,
Aaron
Hello SDV community,
Last week there was a brainstorming discussion between Tom Fleischmann (CARAID) and Daniel Krippner (Bosch/ETAS), touching a range of SDV-related topics. We’d like to give a summary of the points we focused on:
Automotive grade development process for Eclipse SDV projects
- there is a general sense that prospective in-vehicle OSS software needs to be “automotive-grade”
- what that specifically means needs to be elucidated going forward in the community
- there exist very promising starting points for enabling projects to generate bespoke artifacts, one of them is are engineered requirements and the according tracing as proof, A good starting point can be OpenFastTrace: itsallcode/openfasttrace: Open source requirement tracing suite (github.com)
- we would propose to have a show&tell for OpenFastTrace soon, for example in one of our tech alignment sessions and jointly reached out to the maintainers of the project.
Visualizing SDV-related communities
- originally initiated from a set of collaboration workshops in SOAFEE, we spoke about the idea to create a x-initiative visualization of how SDV-related groups play together and how they align topically
- there is a small prep work team in SOAFEE right now, beginning to discuss ideas for this – there might be a great opportunity to leverage Thomas’ subway map of the softwaredefined car
Orchestration layer for diverse workloads
- in the light of the existing and expected diversity of in-vehicle technology stacks (AUTOSAR classic and adaptive, containers both CRI/OCI/non-OCI and more specialized implementations, package-managed systems, sandboxes like web assembly, etc) we discussed how as a community we might embrace this diversity.
- We as well briefly discussed that CARAID is using northstar (https://github.com/esrlabs/northstar). Northstar is written in RUST as is deemed a good fit for our future systems.
- specific automotive-fit implementation details are tbd, but aligning ourselves around a orchestration layer (“control plane”) that we all can agree on and use to integrate runtime stacks might be a way forward that propels SDV towards becoming an actual ecosystem
- this also might be a fruitful topic for one of our next tech alignment sessions
Looking forward for open discussions on the SDV mailing list within our community.
Best regards.
Daniel & Tom