
Documentation
How to use 4DIAC's ROS Communication Interface
4DIAC supports ROS communication for ROS topics, services and actions. ROS topics have been implemented as a communication layer in FORTE, whereas services and actions require customized ROS function blocks. The implementation was tested with ROS indigo and on Ubuntu 14.04. Other versions (ROS or Ubuntu) might cause problems during the execution of the ROS 4DIAC communication interface. The Example service and action FBs can be used to implement your own IEC 61499 compliant communication FBs for the datatypes you need. The ROS communication layer for topics can easily be extended by adding the IEC61499-ROS mapping of other datatypes.
Prerequisites:
- ROS indigo installed on Ubuntu 14.04.
- 4DIAC-IDE installed
- CMake
How to Build FORTE with ROS Functionalities
- Clone forte and switch to the develop branch
$ git clone https://github.com/eclipse-4diac/4diac-forte.git $ cd org.eclipse.4diac.forte $ git checkout develop
- Source indigo installation and start cmake from this "sourced" command line:
$ source /opt/ros/indigo/setup.bash $ cmake-gui
- Press "configure" and set the appropriate CMake variables
FORTE_ARCHITECTURE=Posix CMAKE_BUILD_TYPE=Debug FORTE_MODULE_ROS=On FORTE_RTTI_AND_EXCEPTIONS=TRUE
- After that press "configure" again until the red fields disappear and then press "generate" and build forte with:
$ cd "/path/to/your/forte/build/directory" $ make
- Source your workspace (in the command line where you want to start forte) and start a ROS core (on a different command line):
$ source "/path/to/your/forte/build/directory"/devel/setup.bash $ roscore
- Start forte:
$ cd [/path/to/your/forte/build/directory]/src $ ./forte
ROS Topics
4DIAC implements a Communication Layer for standard ROS topics. Use the PUBLISH_0 / SUBSCRIBE_0 and PUBLISH_1 / SUBSCRIBE_1 function blocks with the following datatypes:
| ROS | IEC61499 |
|---|---|
| std_msgs/Empty | - (empty) |
| std_msgs/Float64 | LREAL |
| std_msgs/Bool | BOOL |
| std_msgs/Int32 | DINT |
| std_msgs/String | STRING |
The ID data input for a communication layer contains the protocol and a string of vendor specific parameters and looks like this:
protocol[parameter]
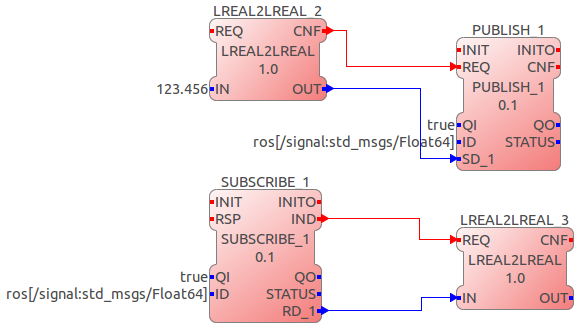
In our case the protocol string is ros. the parameters in square brackets are a ROS-topic namespace and/or name and its corresponding ROS message type, separated by a colon. In general the ID for a ROS publish or subscribe function block looks like this:
ros[topic_name:message_name]
An example of a ROS publish and subscribe connection within FORTE is shown next.
ROS Services
The current implementation of ROS Services is limited to a single service type which is std_srvs/Trigger. This service client and server function block can be used as a template to implement the ROS communication function blocks for your specific application. The interfaces of the trigger service client and server are shown next.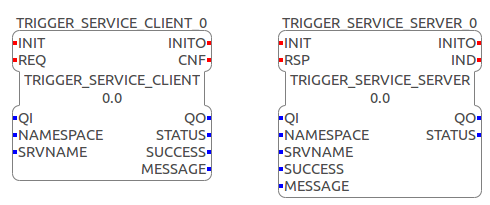
A brief Interface description is given by the next 2 tables that show event and data connections of the implemented ROS function blocks.
| Event Name | Description |
|---|---|
| CLIENT | |
| INIT+ | Initialize Client FB |
| INIT- | Terminate Client FB |
| REQ | Send a ROS service request to the connected server |
| CNF | Client FB successfully received a response from the server |
| SERVER | |
| INIT+ | Initialize Server FB |
| INIT- | Terminate Server FB |
| IND | Server FB received a request from the connected client |
| RSP | Send a response to the client (e.g. when the FBN finished processing the request) |
| Data Name | Data Type | Description |
|---|---|---|
| QI | BOOL | Qualifier input |
| NAMESPACE | STRING | Namespace of the service |
| SRVNAME | STRING | Name of the service |
| QO | BOOL | Qualifier output |
| STATUS | STRING | Status of the FB |
| SUCCESS | BOOL | Value related to response.success in std_srvs/Trigger.srv |
| MESSAGE | STRING | Value related to response.message in std_srvs/Trigger.srv |
ROS Actions
The ROS action type which is currently supported by 4DIAC is reapp_msgs/Execute.action. Its definition is shown next.
#goal string command int32 id1 int32 id2 --- #result string result int32 id --- #feedback string state
You can install this action on Ubuntu 14.04 running ROS indigo via:
sudo apt-get install ros-indigo-reapp-msgs
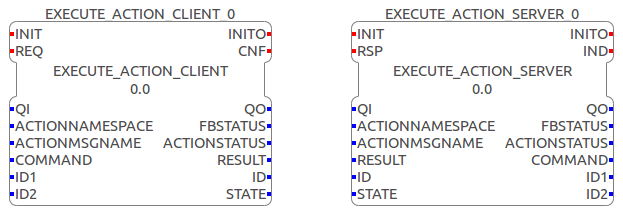
The interface of the client and server FBs is shown in the following figure and described in the diagrams below:
| Event Name | Description |
| CLIENT | |
| INIT+ | Initialize Client FB |
| INIT- | Terminate Client FB |
| REQ+ | Send a ROS action goal to the connected server |
| REQ- | Cancel the current ROS action goal to the connected server |
| CNF+ | Client FB received a result from the server |
| CNF- | Client FB received feedback from the server |
| SERVER | |
| INIT+ | Initialize Server FB |
| INIT- | Terminate Server FB |
| IND | Server FB received a goal from the connected client |
| RSP+ | Send the result to the client (e.g. when the FBN finished processing the goal) |
| RSP- | Send feedback to the client (e.g. intermediate results during processing) |
the data in and outputs of the execute action FBs can be described as shown next:
| Data Name | Data Type | Description |
| QI | BOOL | Qualifier input |
| ACTIONNAMESPACE | STRING | Namespace of the action |
| ACTIONMSGNAME | STRING | Name of the action |
| COMMAND | STRING | Value related to goal.command in reapp_msgs/Execute.action |
| ID1 | DINT | Value related to goal.id1 in reapp_msgs/Execute.action |
| ID2 | DINT | Value related to goal.id2 in reapp_msgs/Execute.action |
| QO | BOOL | Qualifier output |
| FBSTATUS | STRING | Status of the FB |
| ACTIONSTATUS | STRING | Status of the action server |
| RESULT | STRING | Value related to result.result in reapp_msgs/Execute.action |
| ID | DINT | Value related to result.id in reapp_msgs/Execute.action |
| STATE | STRING | Value related to feedback.state in std_srvs/Trigger.srv |
A typical workflow with the execute action client would be to initialize it (INIT+), synchronise the appropriate data for the goal and send the goal (REQ+). When the goal is processed at the server the server may (depending on the implmentation) send feedback to the client. This feedback is recognized by the block via a negative confirm (CNF-). As soon as the server sends the result the client will get the result that is synchronized at the RESULT and ID data outputs of the function block and a positive confirm is triggered (CNF+). Testing and debugging of the action server and client can easily be done with the axserver/ axclient provided by ROS. An axserver that connects to an execute action client within 4DIAC with the configuration
ACTIONNAMESPACE=test_execute ACTIONMSGNAME=localisationcan be started like this:
rosrun actionlib axserver.py test_execute/localisation reapp_msgs/ExecuteAction
Where to go from here?
Go back to Protocols index:
If you want to go back to the Start Here page, we leave you here a fast access
Or Go to top